VCE Systems Engineering involves the design, production, operation, evaluation and iteration of integrated
systems. The study equips students with skills in engineering fields such as manufacturing, transportation, automation, control technologies, mechanisms and mechatronics, electrotechnology, robotics, pneumatics, hydraulics, and energy management.
Students use innovative systems thinking and problem-solving skills throughout the systems engineering
process. They test and verify that their systems are well-built and integrated, evaluate how well the completed system meets the intended goals, and reflect on the systems engineering process to create a satisfactory design outcome.
The selected works are excellent examples of design strategies and production processes employed by VCE students.
Evan Cauchi
Catholic Regional College Sydenham, Sydenham
Wurundjeri Woi Wurrung Country

The EcoEntry System
Raspberry Pi 4 model B, JayCar RFID module, single infrared beam sensor, 5-inch LCD display, 5V relay, 24VDC 4PDT relay, Barber Colman actuator, 24V 100W solar panel, 2x 12V 9Ah SLA battery, PVC
I have designed and constructed an automated boom gate system that integrates RFID technology and an infrared sensor for secure and efficient access control. The system is powered by a solar panel and features a robust actuator to manage the gate’s movement. RFID cards authenticate users, while the infrared sensor detects vehicle presence. This project explores the practical application of renewable energy and automation in modern infrastructure, emphasising sustainability and functionality.
Angus Geddes
Scotch College, Hawthorn
Wurundjeri Woi Wurrung Country
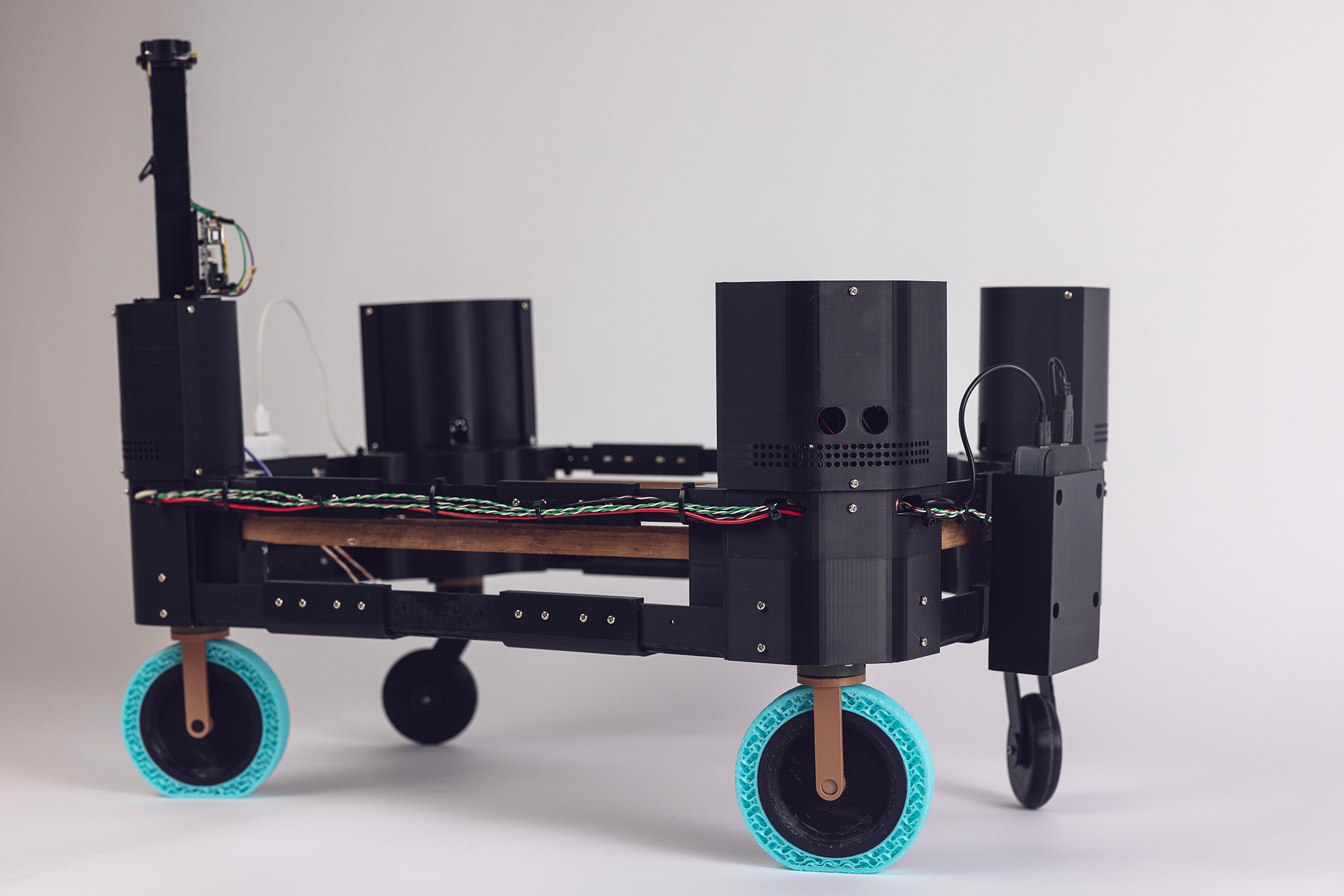
M.A.T.R. (Modular Autonomous Tractor Replacement)
Raspberry pico, arduino uno, GPS module, radio receiver, ultrasonic sensor, Rotary Hall-effect sensor, Dc motor driver, 12V geared DC motor, 11.1V LIPO battery, power bank, PLA, TPU, SLS nylon
M.A.T.R. is designed to replace traditional tractors in broad acre agriculture, specifically within cropping. Just like a tractor, it can use multiple implements. However, these are stored centrally within the frame to allow for omnidirectional movement from the swerve drives. The force of two motors can be assigned variably to steering or drive through the use of a differential mechanism. The project can either be driven manually or can navigate a preplanned path.
Santiago Leys De La Rosa
Newhaven College, Rhyll
Boon Wurrung Bunurong Country
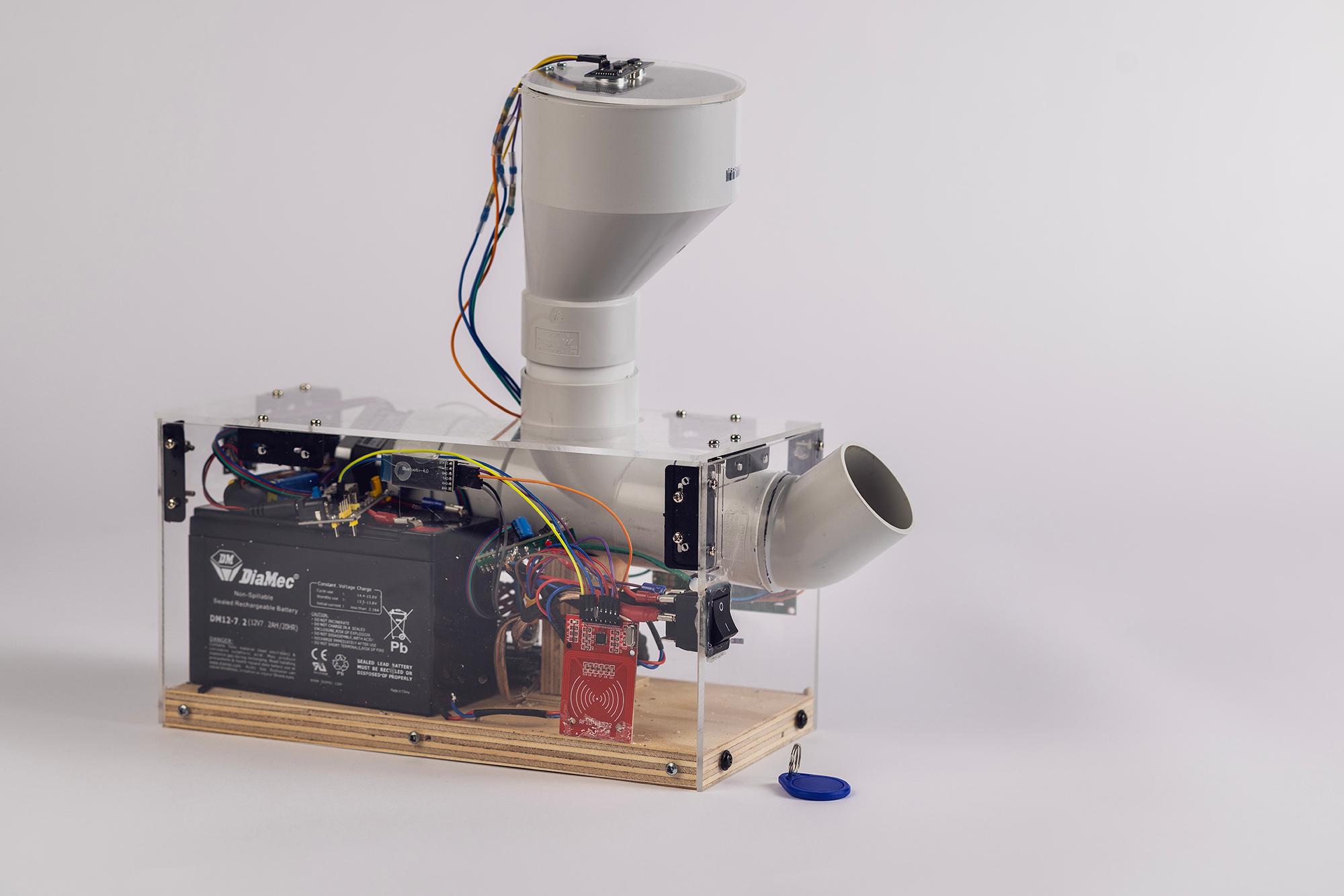
Automated Chicken Feeder
Arduino Uno, HC-SR04 ultrasonic sensor, RC522 RFID reader, NEMA 17 stepper motor, TB6600 motor driver, HM-10 Bluetooth module, 12V 7.2Ah battery, 12V DC fan, LCD display with I2C, voltage regulators
I designed an automated chicken feeder to improve efficiency and reduce feed wastage in poultry farming. The system dispenses feed using a stepper motor and monitors hopper levels with an ultrasonic sensor. RFID tags identify specific chickens for tailored feeding, while Bluetooth enables remote monitoring. This project aims to make farming more sustainable and cost-effective.
Caleb Tobin
Catherine McAuley College, Bendigo
Dja Dja Wurrung Country Country
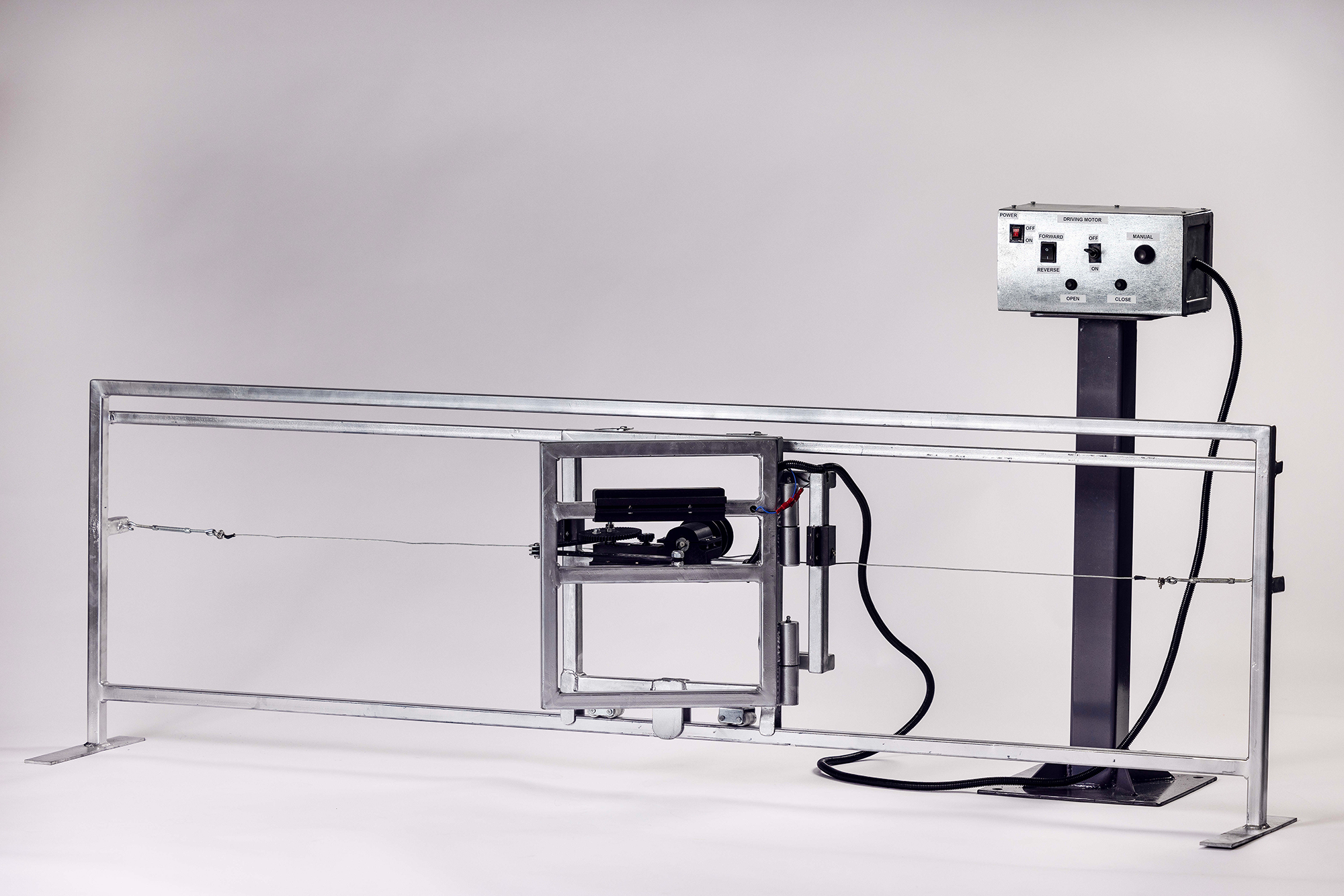
Automated Sheep Yard
PLA 3D-printed components, RHS, FMS, solid round bar, DC motor, servo motor, toggle switches, micro switches, SLA battery, Arduino Uno R3, galvanised wire rope, loom tube
I have invented a livestock handling device designed to improve efficiency and safety for both animals and farmers. The system follows livestock and provides continuous flow, allowing handlers to perform tasks with minimal movement. Micro-switches detect livestock alongside custom 3D-printed mounts in the steel-made system. The actuator arm controls the gate, enabling livestock entry, while a cable winding mechanism propels the gate forward and backward. This system helps farmers increase profitability and reduce overhead costs.
Sarannaphat Hindam
Newhaven College, Rhyll
Boon Wurrung Bunurong Country

Self-Stabilising Plane
Gyroscope(GY87), servos, Arduino Nano, model plane, battery (9V), control rods, linkages, control rods, wires
This project enhances flight safety by stabilising an aircraft if the pilot becomes unconscious, preventing crashes. A gyroscope monitors pitch, roll and yaw, providing real-time orientation data. An Arduino microcontroller processes this data to signal servos, which adjust the rudder, elevators and ailerons for stability. Failsafe devices ensure level flight or a controlled descent during system failure, minimising risks to people and property. Designed for high-stakes scenarios, this system prioritises reliability and precision.
Tanner Mills
Newhaven College, Rhyll
Boon Wurrung Bunurong Country
Auto Tracking Spotlight
Freenove control board V4, AMG8833 IR thermal camera, servo motor, switch, LED, relay, PLA 3D-printed components, 9v batteries
I have produced a device that uses thermal detection to autonomously detect, track and illuminate people. The control board uses the data gathered from the thermal camera to drive a servo positioned at its base, so that the device is facing its target. While this happens, the LED subsystem is activated. This happens via a relay connected to an LED, which has its own power supply. The device has been made to minimise user input, relying only on it being set up on a tripod with the switch toggled on. The device will autonomously track a person as they walk through its detection radius. Once the person is out of range, the device will return the servo to its starting position and deactivate the LED to preserve battery life.
Alex Woodhouse
Blackburn High School, Blackburn
Wurundjeri Woi Wurrung Country

Droney (Drone Relocation and Object Navigation for Efficient Yield)
Arduino Uno R4 Wi-Fi, brushless DC motors, electronic speed controllers, LIPO battery, electromagnet, 3-Axis gyroscope, ultrasonic sensors, propellers, PLA 3D-printed components, laser-cut acrylic
I have developed a four-propeller drone named Droney (Drone Relocation and Object Navigation for Efficient Yield), to streamline port operations by relocating objects. It uses an Arduino Uno R4 Wi-Fi to control flight systems and an electromagnet for object pickup. Four ultrasonic sensors assist with object detection, while a three-axis gyroscope ensures stability. Made from PLA 3D-printed components and laser-cut acrylic, Droney is powered by four brushless DC motors and a 14.8V LiPo battery, operated via the Arduino IoT app.
Liam Fraser
Blackburn High School, Blackburn
Wurundjeri Woi Wurrung Country

Automatic Car Sorter
Arduino Uno, servo motors, colour sensor, servo control board, PLA 3D-printed components, laser-cut acrylic, switches, batteries
My project is an automatic car sorter that sorts the cars by colour. It uses a colour sensor to sense the different RGB values of the car that is placed on it. If the RGB values match, a crane will pick up the car and place it in its correlating carpark (for example, green to green). My project is currently coded to sort red, blue and green cars. If another coloured car is placed on the sensor nothing will happen.